
在多數全自動駕駛技術的基本需求當中,多半會需要結合 3D 地圖資訊做為自動駕駛的資訊參考,這也是多數自動駕駛測試多半選擇在擁有完整圖資的地方進行,而麻省理工學院的團隊開發了一套名為 MapLite 的自動駕駛系統,僅需要進行 GPS 定位,再結合車上感測器,即可再缺乏 3D 圖資的情況、例如鄉間小路進行自動駕駛。
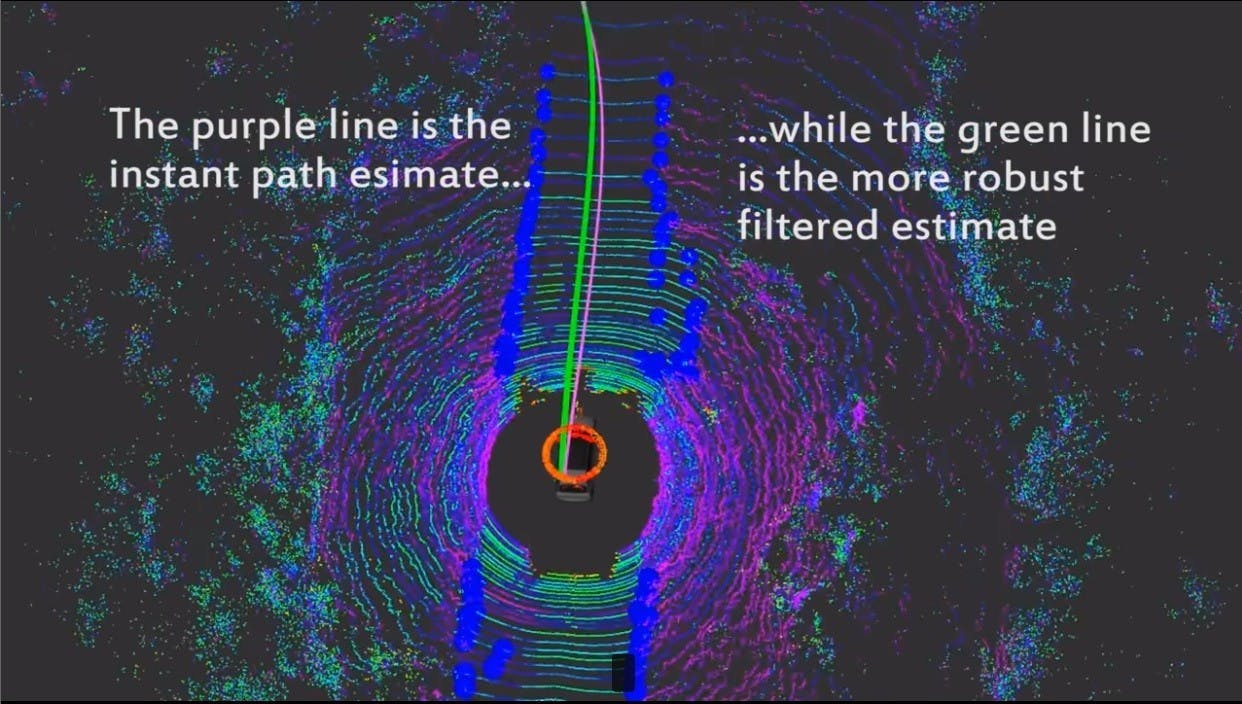
這套系統可利用 GPS 數據推估車輛的基本位置,藉由在車輛系統的可視範圍產生 local navigation goal ,這個 local navigation goal 與自動駕駛的導航終點不同,是作為讓自動駕駛車前進的方位目標,而自動駕駛系統會依照 local navigation goal 搭配車輛的感測器規劃一條從當前移動到 local navigation goal 的路線,並利用 LiDAR 測量道路邊際,能在缺乏完整圖資的前提下進行自動駕駛。
以當前的情況,很難將所有的可行道路全部進行高精密度的 3D 圖資建構,同時加上道路景致與周邊的參照標的物更有可能因為道路施工等因素產生變化,如此種可自行依照車上的感測器資訊進行自動駕駛的規劃也是有必要的。
像在台灣,即便在都會區,道路的周遭亦常常伴隨施工有顯著的變化,更不用說有許多山間小路與產業道路,要將這些路線全部進行 3D 圖資化並不容易,若這套系統能商用化,也有助於因應這些特殊路線。
新聞來源: The Verge



















