在昨天台灣 GTC 的活動上,與 NVIDIA 負責自動駕駛領域的技術人員小聊了自動駕駛相關的議題,畢竟先前 Tesla 的嚴重事故也讓不少產業人士與消費者質疑現階段的自動駕駛的安全,不過回到發生事故的 Tesla 上,後續的事故分析指向感測器能力以及核心硬體並不適任自動駕駛應用。
先釐清當時發生事故的情況, Tesla 用於自動駕駛的方案是基於 Mobileye 的 ADAS 先進輔助駕駛平台,並搭配雷達與攝影機,而發生事故的情況是因為白色車輛因強光反射,引發攝影機無法判讀物體,而搭配的雷達也因為將車輛誤判為收費站、陸橋一類的設施,同時也缺乏 3D 地圖輔助,導致系統因資訊不正確而發生意外。

事後 Mobileye 也發出聲明,表示它們提供給 Tesla 的解決方案仍是為一般 ADAS 所設計,並不足以用於自動駕駛;而先前國外汽車媒體則爆料, Tesla 雖打算繼續升級自動駕駛用的感測器,添加更多的相機與雷達,但並無搭配光達的計畫。

光達是甚麼?基本上是近似於雷達,只是將放出的偵測體由無線電波改為雷射光,相較於雷達因精度較差,多半用於量測與其它物體的相對距離,光達卻足以呈現物體的輪廓,例如目前許多的地理 3D 模型建構都是仰賴光達構成。
到底光達有沒有必要性? NVIDIA 的技術人員相當保留的表示,它們的自動駕駛車開發平台 BB8 ,或是與 Roborace 合作的自動駕駛賽車,皆具備光達設計,雖然光達價格相對攝影機與雷達高昂,卻在自動駕駛的環境感測具有相當重要的意義。在 NVIDIA 的自動駕駛實驗中,三項感測器之間是彼此相輔相成,在不同環境下都有其意義存在。
就以 Tesla 的事故狀況,當時的情境因為相機在高光顯像的極限而無法正確判斷車輛,而測距的雷達僅能知道旁邊有近似於基礎設施一類的大型物體,若當時有光達搭配,或許能夠因為偵測到物體形狀而判斷出有車輛接近。

相機雖是做為外界物體、路況感知的基礎感測器,但現今的技術於高、低光環境皆難以獲得精確的影像,更不用說雨天的情況;雷達雖能偵測與物體的相對距離,但不足以判斷物體的輪廓;至於光達則讓系統得知附近物體的輪廓,但若沒有影像數據的輔助,有時也無法正確判讀是哪一類物體。
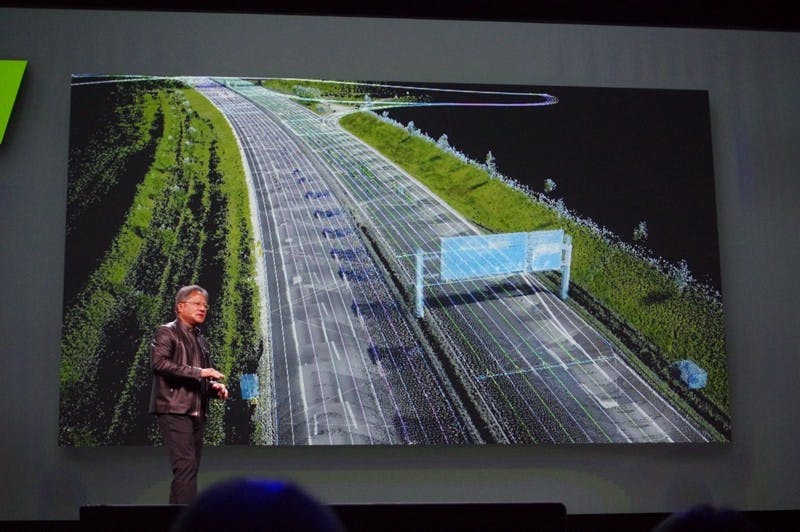
除了這些對外感知以外,全自動導航結合 3D 高解析地圖資訊也是有其必要性的,雖然有些人認為 2D 地圖難道就不行嗎?然而 3D 地圖最重要的地方不僅於提供 GPS 定位的路線參考規劃,而是將地圖中的 3D 資訊結合感測器偵測到的周遭情況進行對照。

以 Tesla 發生意外的狀況來說,當主要負責視覺的相機與雷達將車輛誤判為道路基礎設施時,如果搭配 3D 地圖的資訊,至少就會得到該位置不應該出現基礎設施的警告,當不該出現基礎設施的地方出現疑似基礎設施的物體,系統至少會知道感測器推測出來的資訊是有問題的,如此一來藉由 3D 圖資資料,至少還可作為一道防止意外發生的防線。
就目前自動駕駛的發展狀況,分為初步的高速公路巡航,駕駛到指定地點的駕駛替代,以及最長遠的人工智慧互動式自動駕駛;快速公路巡航駕駛實際上是許多先進輔助駕駛系統已經著手的應用,然而先進輔助駕駛僅止於依照標線駕駛或是跟車應用,當具備自動駕駛技術後,應該是要能夠包括超車以及在正確的地段切換到其他快速道路。

比起市區道路,快速道路與公速公路相對是單純的環境,鮮少會出現如紅綠燈等號誌,也不太會有十字路口,車輛可依照地上的標線做為參考行進,而結合自動駕駛系統後,系統除了基本的保持安全距離外,還可偵測周遭的車輛情況,推測道路可用安全空間,辨識交通告示如速限、道路縮減等資料,使高速巡航自動駕駛能夠不只是直線前進。
中程目標的指定地點駕駛則有點類似搭計程車,告知自動駕駛系統要前往的地方,車輛自行安排路線並完成駕駛行為,這也就是屬於司機取代型的自動駕駛,要達到這一層目標,不僅止於完成市區內的自動駕駛,也還包括郊區的自動駕駛行為。
市區的自動駕駛複雜的地方大家應該已經深知,包括複雜的交通工具同時在狹窄、多變的道路行進,以及更多因人為操作產生的突發狀況;而郊區自動駕駛則是另一種複雜性,因為郊區駕駛雖然車輛不多,但卻會遇到如缺乏可參考的標線、甚至沒有明顯的道路的情況,像是歐洲郊區還有不少是碎石路或是馬車用的磚道等。
至於遠程的目標所指的人工智慧互動駕駛,在某些程度上可能讓世界減少私有車輛,或是從根本扭轉對於都會大眾運輸工具的概念,在此時的人工智慧駕駛系統可揣測使用者的習慣與行為,例如透過與感測器一類的結合,在下班時自動前往接送乘客,甚至途中把乘客先送去餐廳,中間也會自行尋找車位等。
另外的延伸應用就如福特的城市交通實驗或是如 Uber 打算測試的無人化載具共用概念,也就是將載具視為共享財,或是更個人化的公車;相較傳統的公車是以特定路線移動與定點停車,藉由全自動化共享的無人化載具使大眾運輸的模式改變。
不過無人化載具共用不會完全淘汰公車與火車等公眾載具,而是互補與使用最佳化的概念,在長途的移動中仍藉由公車與火車(但仍就可能變成無人化駕駛),都會內的移動則由共享無人化載具取代,相較傳統都會中的公車,可達到載具更有效化的應用,也減少交通的混亂或是公車使用率過低的情況。

但自動化駕駛技術的盲點,還是在於人的擁有欲與控制欲,不少人對於人工智慧的不信任性仍高,多半還是會認為電腦的穩定性不及人類,但偏偏人類的不確定性本身卻又是在充滿秩序的情況下最大的安全阻礙,分心以及無法達到全面的感知,是人類作為駕駛最大的不確定性。
雖然目前的自動駕駛成熟度仍不足以達到高安全性,不過當技術成熟之後,反而有人駕駛車輛才是問題的根源;目前多半的交通事故發生原因是因為突發狀況造成,但無人化駕駛若結合車聯網技術,車輛之間可自行管理安全距離的情況下,反而由人類駕駛的車子會產生不確定性。

由於自動駕駛車相較於僅透過雙眼與耳朵作為對外感測的人類,車輛有著大量的感測器與 HD 地圖對照,理論上可同時兼顧前後左右的路況,不過在自動駕駛居多的道路環境上,因人類駕駛分心造成的突發狀況,現階段也很難確保能否因人工智慧的導入而減少意外發生,畢竟除了系統判讀以外,還要加上車輛基本的物理動態,例如煞車距離與緊急轉彎等。
雖然說當這些突發狀況發生時,連多數的人類都無法避免發生事故,但以人類對於自動駕駛的期許,卻又會希望人工智慧能夠達成,這也是在人工智慧發展當中相當矛盾的一點,但基於人工智慧的自動駕駛是必須的未來,這卻已經是相當確立的科技發展
你或許會喜歡



















