NVIDIA於GTC 2024公布針對新一代機器人的Project GR00T人形機器人基礎模型計畫,而在GTC 2025,NVIDIA再宣布率先公布全球首個開放、可完全自定的人形機器人基礎模型Isaac GR00T N1,以及包括攜手Google DeepMind、Disney Research攜手下一代開源物理引擎Newton,還有全新用於生成合成資料的NVIDIA Isaac GR00T Blueprint與開源資料集啟動實體AI資料飛輪,提供加速機器人開發的模擬框架,加速機器人產業的進展。
NVIDIA GR00T N1訓練資料和任務評估情境即日起可從Hugging Face與GitHub下載,用於產生合成操作動作的NVIDIA Isaac GR00T Blueprint同樣自即日起可在在build.nvidia.com上以互動展示的形式提供,或自GitHub下載。Newton物理引擎預計在2025年內釋出。此外NVIDIA也自即日發公布GR00T N1資料集,將透過HuggingFace釋出開放下載。
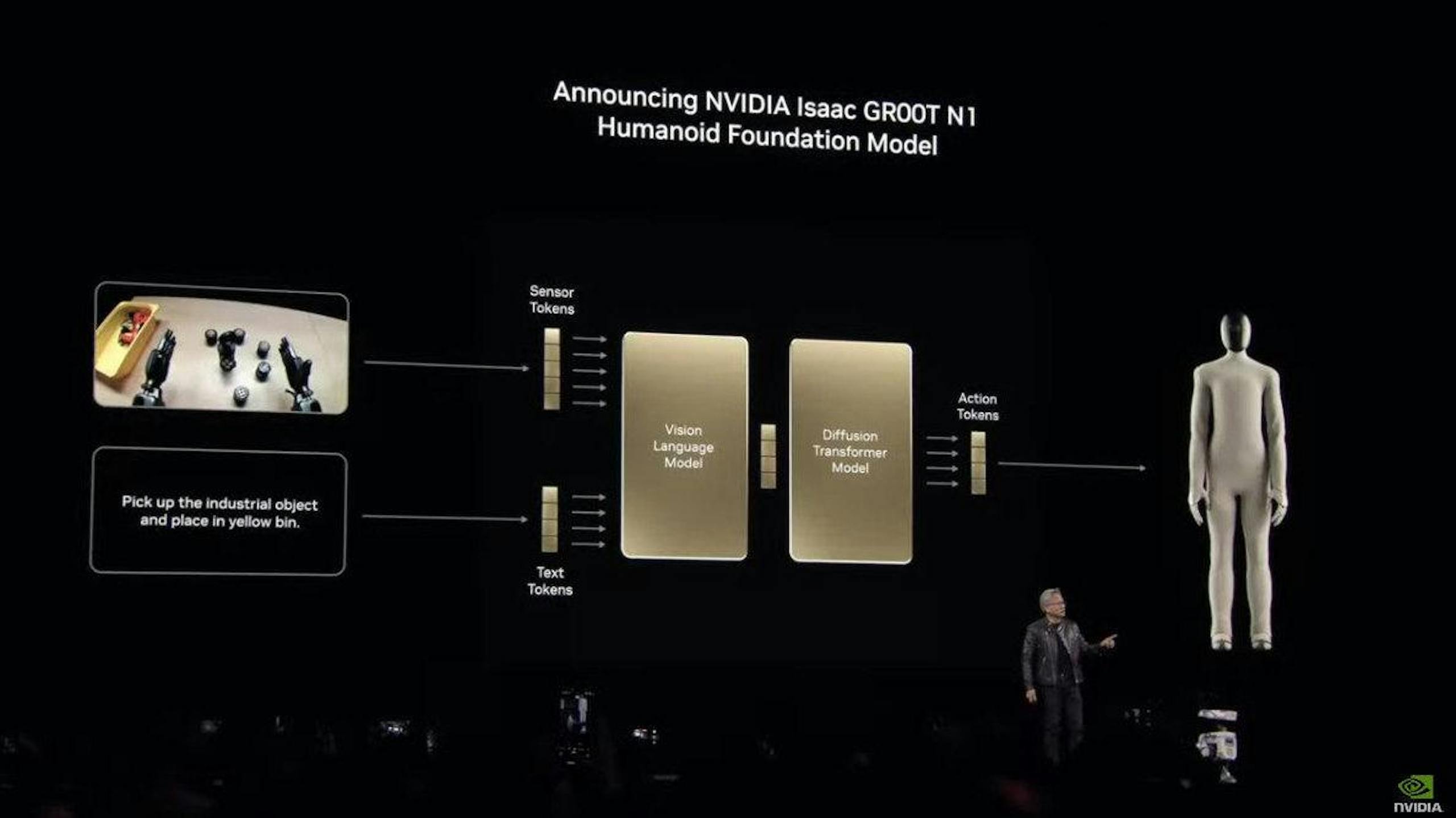
▲GR00T N1是全球第一款開源、可完全自定的人型機器人基礎模型,透過預訓練足以執行許多產線自主機器人的基本任務
GR00T N1是由NVIDIA所進行訓練,並為全球第一款開源、可完全自定的人形機器人基礎模型,旨在加速新一代機器人,藉此舒緩全球缺工的情況;GR00T N1基礎模型採用雙系統架構,靈感來自於人類的認知原理;當中的「系統 1」是快速思考的動作模型,反映人類的反射或直覺,而「系統 2」是一個緩慢思考的模型,用於深思熟慮,做出有條理的決策,透過兩個系統相輔相成並截長補短。
在視覺語言模型的支援下,「系統 2」會對身處的環境和收到的指令進行推理以規劃行動。然後「系統 1」會將這些計畫轉換為機器人身上精確連續的動作。「系統 1」的模型由人類示範的資料與NVIDIA Omniverse平台所產生的大量符合物理原則的合成資料訓練而成;GR00T N1可以輕鬆用於處理一般任務,像是用一或兩隻機器手臂抓取、移動東西,以及將東西從一隻手臂換到另一隻手臂,或是執行需要長上下文與一般技能組合的多步驟任務,這些基本功能足以應用在透過自主機器人搬運材料、包裝和檢查等情境,開發者也能針對特殊應用情境以GR00T N1以額外資料及合成資料進行後期訓練。
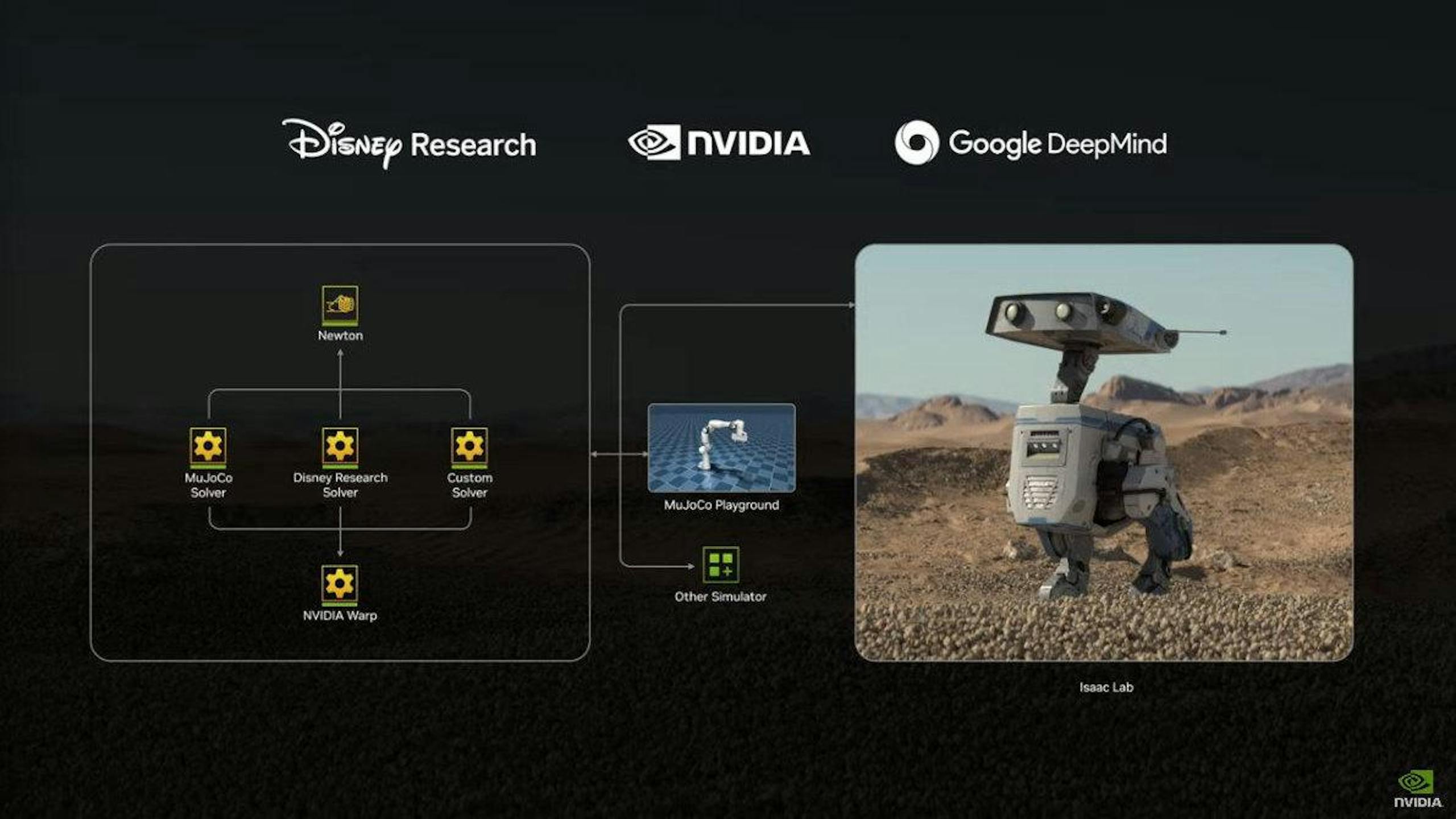
▲NVIDIA、Google DeepMind與Disney共同開發開源物理引擎Newton,可使機器人AI模型於更趨近真實物理的數位孿生環境訓練與驗證
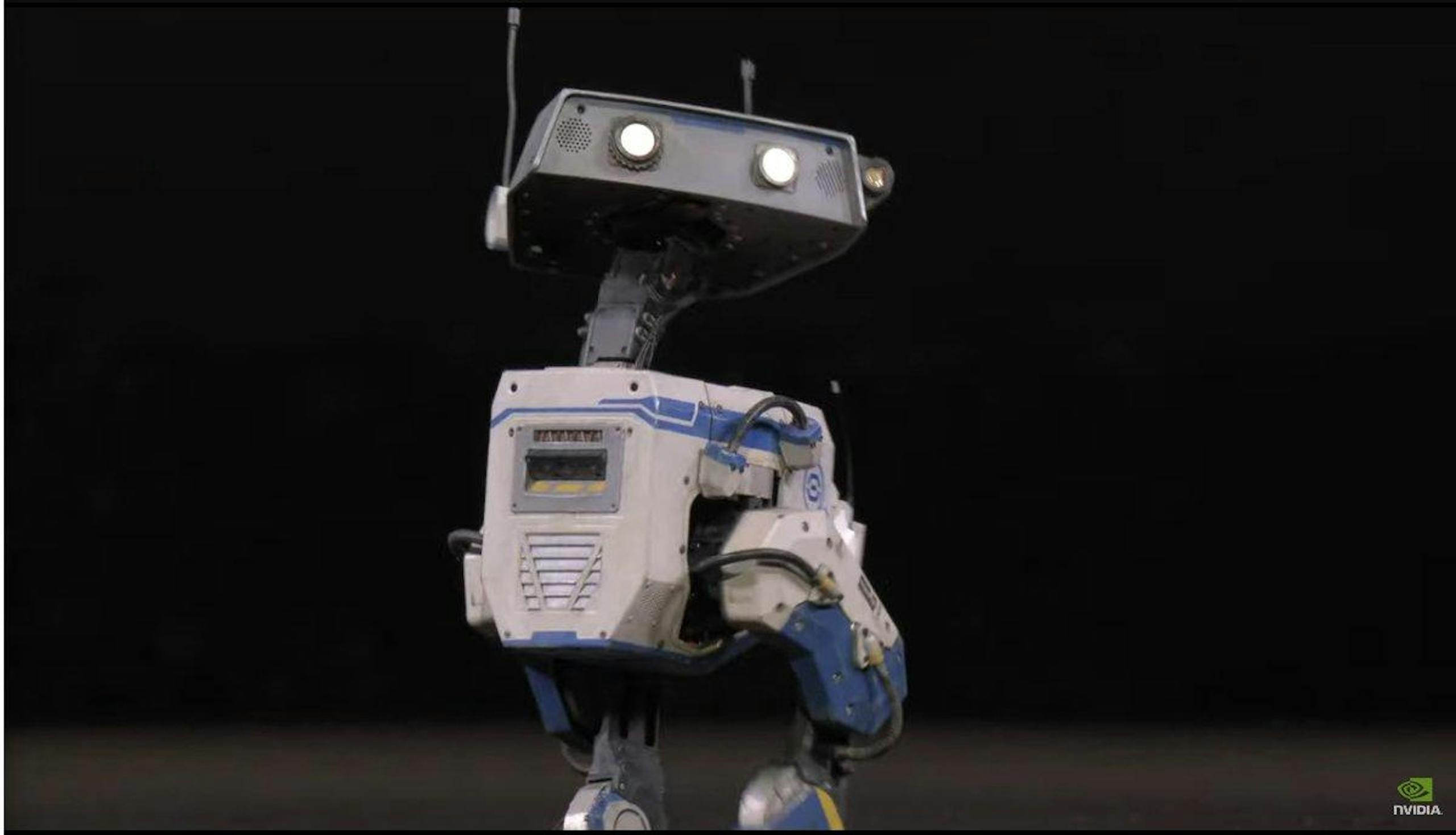
▲Disney Research的娛樂型機器人BDX以星際大戰為發想
▲BDX套用GR00t N1作為行為基礎模型
NVIDIA也與Google DeepMind、Disney Research合作開發全新的開源物理引擎Newton,Newton基於NVIDIA Warp框架並針對機器人情境最佳化,Newton也相容於Google DeepMind的MuJoCo和NVIDIA Isaac Lab等模擬框架,後續也計畫讓Newton能夠使用迪士尼的物理引擎。Google DeepMind與NVIDIA 正在合作開發MuJoCo-Warp,預期將機器人機器學習工作負載加速70倍以上,並且將透過Google DeepMind的MJX開源函式庫及Newton提供給開發人員使用;而Disney Research將率先活用Newton開發娛樂機器人,同時也藉GTC展示以「星際大戰」為靈感的以的BDX機器人,BDX搭載兩個NVIDIA晶片進行運算,並執行GR00T N1作為行為基礎模型。
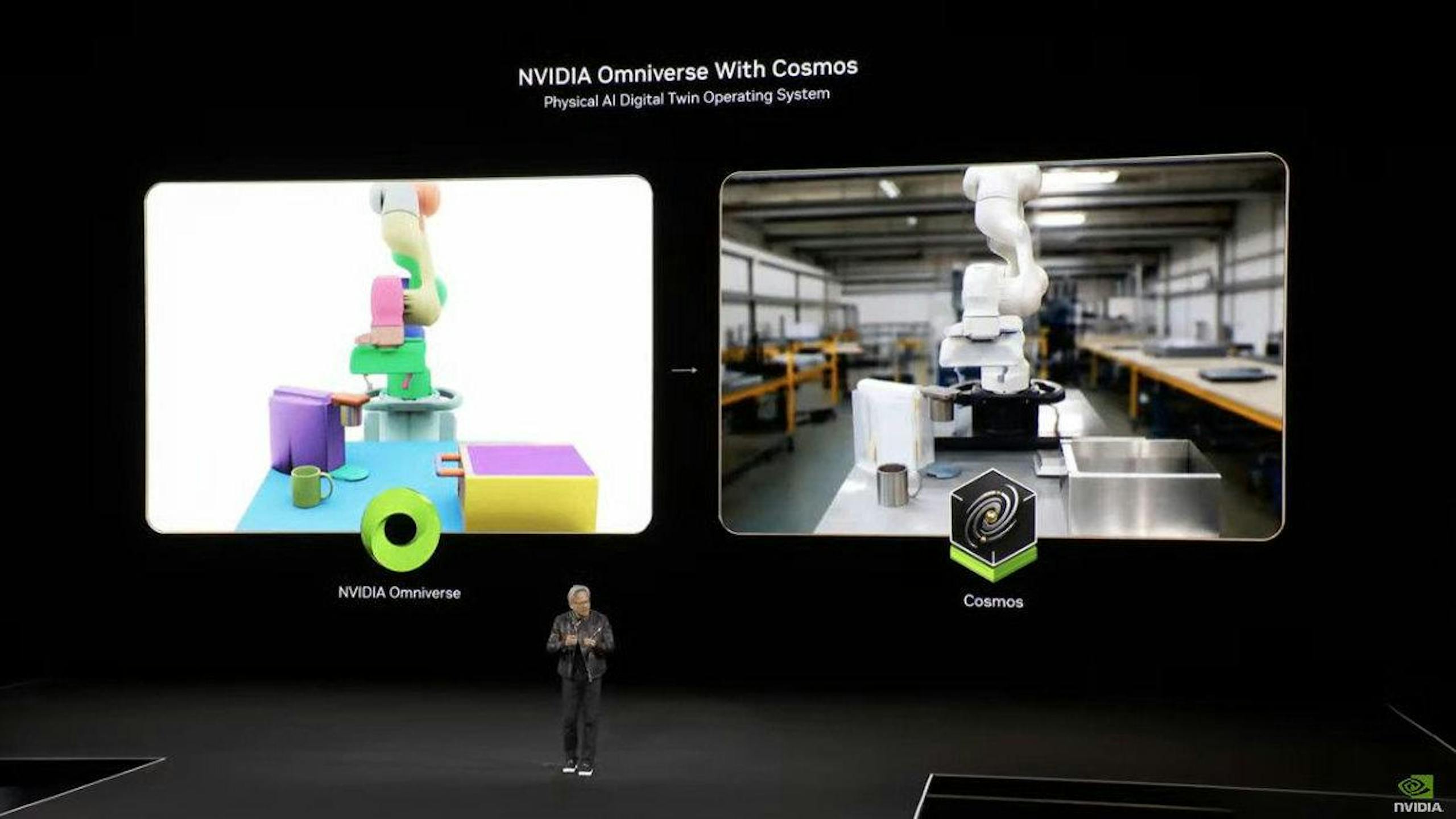
▲透過Omniverse with Cosmos可產生大量有用的合成資料
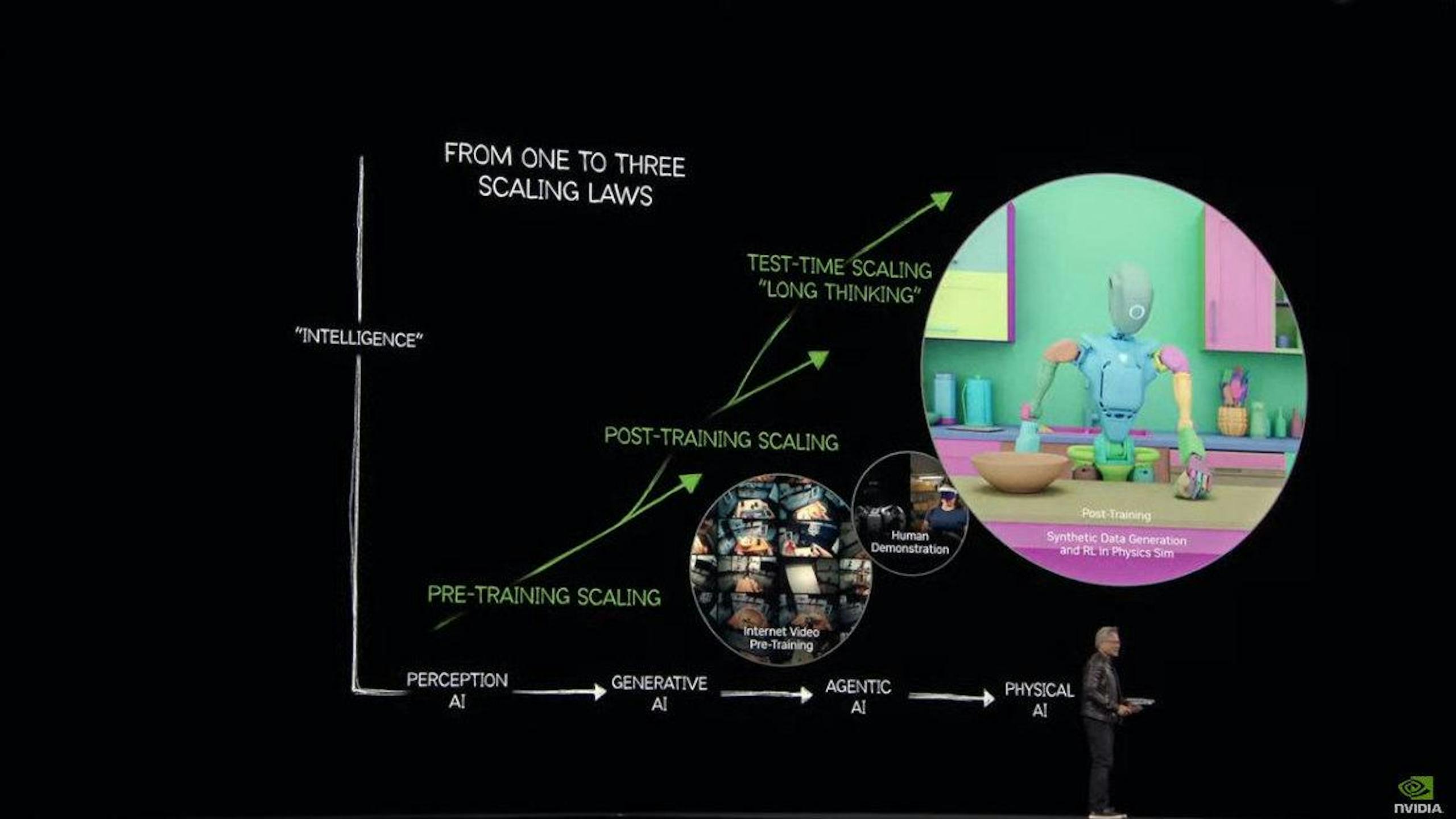
▲結合真實數據與合成資料進行訓練,相較使用有限的真實資料可大幅機器人模型的效能
此外NVIDIA公布用於產生合成操控動作的NVIDIA Isaac GR00T Blueprint,以Omniverse與Cosmos Transfer世界基礎模型為基礎,僅需少量的真人示範,即可產生大量符合真實物理原則的合成資料;NVIDIA使用NVIDIA Isaac GR00T Blueprint僅11個小時裡即產生出78萬個合成軌跡,相當於6,500 個小時或連續9個月的真人示範資料,同時NVIDIA將合成資料加上真實資料用於訓練,相較於只使用真實資料,使GR00T N1效能提高了 40%。
於GTC 2025公布的全新個人AI超級電腦DGX Spark能夠作為機器人開發人員提供一站式系統,可擴充GR00T N1的功能以用於新的機器人、任務和環境,且無需自行撰寫大量程式。