
隸屬 Formula E 下的無人自駕車賽事 Roborace 在 7 月初成功挑戰英國古德伍德速度嘉年華( FoS )的自我紀錄,創下較 2018 年以 RoboCar 快近 15 秒的成績,古德伍德速度嘉年華官方與 Roborace 也在期間公開車外視角與車內視角的實車奔馳影像片段,不過稍早 Roborace 釋出一段更微特殊的影像,是 DevBot 2.0 的 LiDAR 光達與車側影像的組合片段,讓粉絲一睹機器之眼與人眼不同的地方。
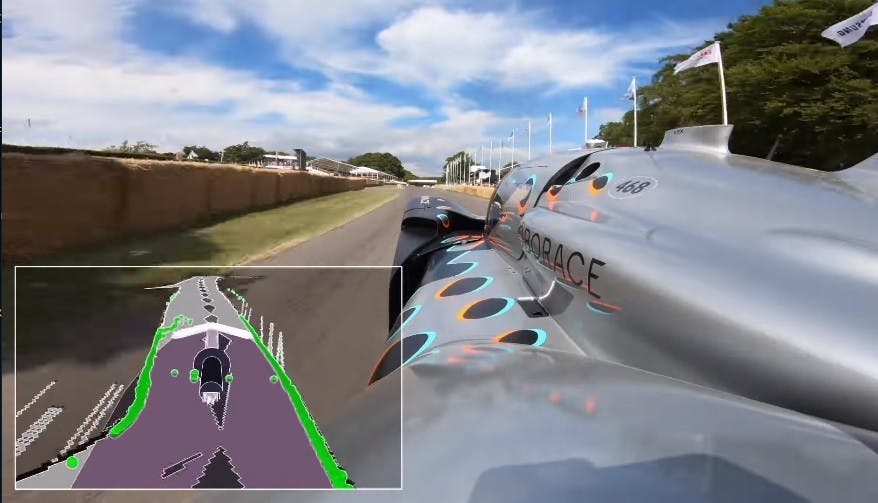
Roborace 公布的影像是以 3D 地圖為基礎與光達結合的路線資訊,對於 Roborace 所使用的自動駕駛技術而言,其外界感知的基礎是基於 GPS 定位與 3D 圖資作為基礎,再輔以雷達、光達與影像等資訊構成,在此次公布的影像當中,光達量測出的道路邊際(實際上就是牆壁)以綠色顯示,而自動駕駛系統則設法判斷怎樣的路線是可用路線,光達扮演著確認車輛在道路定位的重要責任,確保接下來的行駛路線不會撞牆。
新聞來源: Roborace



















