汽車未來 俥科技 自動駕駛 roborace 光達 俥科技: Roborace 公開 DevBot 2.0 於古德伍德行駛的 LiDAR 影像圖,一探自駕車"眼"中的世界長怎樣 隸屬 Formula E 下的無人自駕車賽事 Roborace 在 7 月初成功挑戰英國古德伍德速度嘉年華( FoS )的自我紀錄,創下較 2018 年以 RoboCar 快近 15 秒的成績,古德伍德速度嘉年華官方與 Roborace 也在期間公開車外視角與車內視角的實車奔馳影像片段,不過稍早 Roborace 釋出一段更微特殊的影像,是 DevBot 2.0 的 LiDAR 光達與車側影像的組合片段,讓粉絲一睹機器之眼與人眼不同的地方。 ▲光達結合 GPS 資訊為車輛進行定位 Roborace 公布的影像是以 3D 地圖為基礎與光達結合的路線資訊,對於 Roborace 所使用的自動駕駛技 Chevelle.fu 5 年前
汽車未來 賽車 自動駕駛 drive px2 roborace 自駕賽車古德伍德速度嘉年華自我挑戰成功, Roborace DevBot 2.0 較去年 Robocar 快近 15 秒 來自 Roborace 的無人駕駛賽車 DevBot 2.0 在完成古德伍德速度嘉年華 Goodwood Festival of Speed 2019 年首日的展示後,於第二日正式進行無人駕駛單圈紀錄挑戰,在去年 Roborace 以無人賽車 Robocar 首度挑戰古德伍德爬坡賽道時,以 1 分 20 秒跑完全程,而今年 DevBot 2.0 在持續強化 AI 駕駛模型後,將記錄刷新到 66 秒,雖較今年同樣以電動車技術刷新 10 年前 F1 留下紀錄的 Volkswagen I.D. R 的 39.9 秒紀錄還有點距離,然而也已經是相當大的突破。 ▲ DevBot 2.0 今年以 66 秒 Chevelle.fu 5 年前
汽車未來 賽車 自動駕駛 roborace nvidia drive px Roborace DevBot 2.0 在古德伍德速度嘉年華展現自動駕駛技術,以穩定而流暢的路線跑完全程 在去年以無人賽車 Robocar 挑戰古德伍德速度嘉年華 Goodwood Festival of Speed 的 Roborace ,今年則選擇新一代測試車款 DevBot 2.0 參與活動,不同於 Robocar 為純自動駕駛賽車, DevBot 2.0 採用傳統賽車的底盤機構與具備駕駛艙,可由人類進行控制,去年由 Roborace 獨自跑完全程並參與計時測試,今年則由來自摩納哥的 19 歲汽車 YouTuber Seb Delanney 負責將 DevBot 2.0 駕駛到賽道中央的草坪後,交棒 DevBot 2.0 自動駕駛系統完成後續賽道,完成以展示為主的試跑。 ▲ 在 Seb De Chevelle.fu 5 年前
汽車未來 自動駕駛 drive px2 roborace Roborace 宣布將以 DevBot 2.0 電動自駕車再戰速度嘉年華 在去年,隸屬電動方程式 Formula E 下的無人賽車賽事 Roborace 以第一世代的賽車參加每年例行的古德伍德速度嘉年華 FoS 大會,當時展現當前無人車在爬坡賽道中夠跑出的 1 分 20 秒表現,而今年 Roborace 再度宣布參加這項跑車與賽車界盛事,不過使用的車款則由純無人賽車 Robocar 改為用於訓練駕駛邏輯用的新一代 DevBot 2.0 ,不過也將完全透過無人駕駛方式進行挑戰。 2019 年的古德伍德速度嘉年華將在 7 月 4 日舉辦。 ▲ DevBot 2.0 有著完整的車殼,並由四輪驅動改為後輪驅動 DevBot 1.0 除了是作為技術驗證開發與訓練用的車款外,也 Chevelle.fu 5 年前
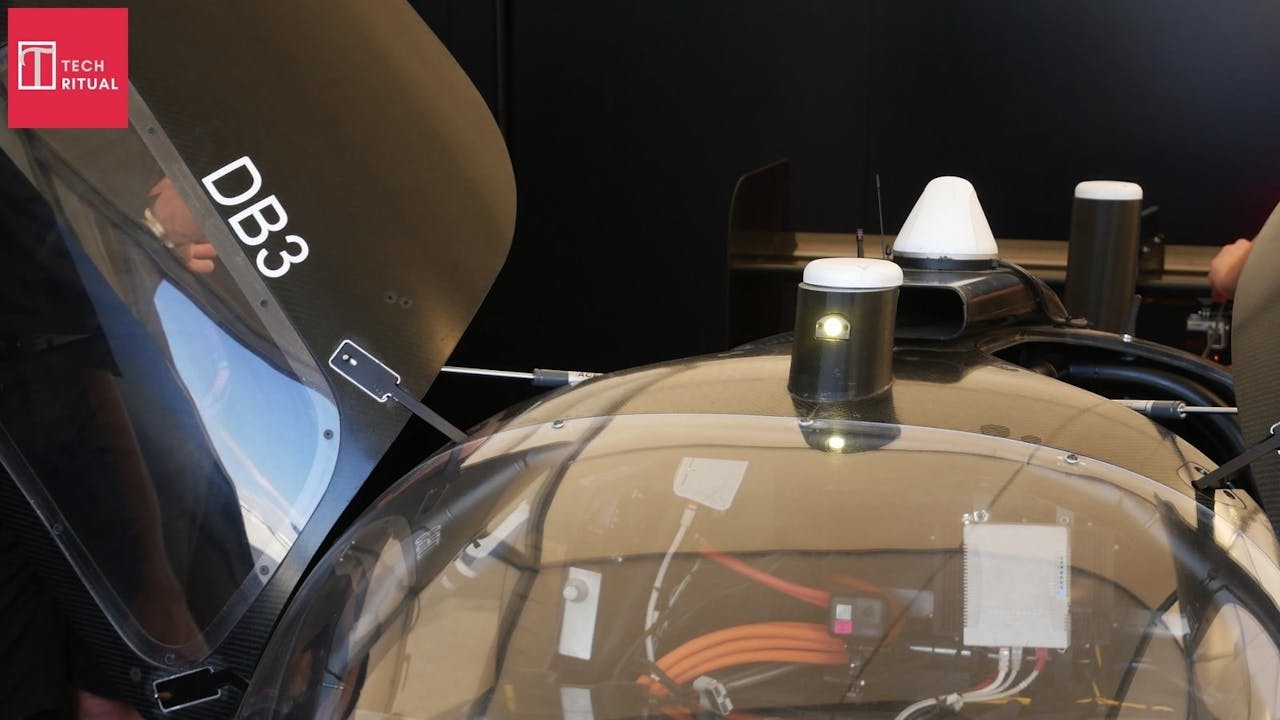
新奇搞笑 ROBORACE DevBot 香港親眼看,無人駕駛戰車感覺就像小時候玩的四驅車 Formula E 賽事以香港作為首站,大家應該都看得津津樂道吧! 除了各款 Formula E 外,現場其實也有 ROBORACE DevBot 在現場演示。我們 TechRitual 也跟大家親眼看了一下這些自動駕駛賽車的情況。 ROBORACE DevBot 雖然說是無人駕駛戰車,但它實際上是一台實驗用車,未來真實比賽用上的是 ROBOCAR。 [embedded content] DevBot 車身外觀活像一台四驅車。車身內部還有一個足夠車手乘坐的位置。把 DevBot 駛到賽道上時就需要用到車手以確保安全,直到清空跑道才會切換成自動駕駛模式。 DevBot 車身內我們很容易就見到的 stoneip 7 年前
首場Roborace無人駕駛賽車以車禍收尾… 在第二屆Formula E賽事於阿根廷布宜諾斯艾利斯站展開首場「Roborace」無人自動駕駛車測試賽中,由電腦自動操控的無人駕駛賽車終究還是在時速185公里高速下發生車禍。 從Roborace官方Twitter頁面說明狀況,指出這場測試賽下場比試的兩輛無人駕駛賽車實際車禍原因,主要在於後車以超過極限方式近彎,導致車輛在打滑失控情況撞上護欄,而前車則維持在賽道上完成比賽。而Roborace官方更強調這場賽事無人傷亡,畢竟下場競速的兩輛賽車都是以電腦操控,因此沒有任何人受傷也是相當正常。 不過,若從相關結果來看的話,顯示後車的電腦系統從實際取得數據推演到實際執行結果,依然無法在物理原則極限內維持 Mash Yang 8 年前
nvidia TEGRA 自動駕駛 科技生活 pascal formula e drive px2 roborace Roborace 自動駕駛賽車 DevBot 套件已正式投入測試 圖片來源: The Verge隸屬 Formula E 電動方程式旗下子賽事 Roborace 預計在 2017 年開賽,雖然已經公布車輛設計概念以及將採用 NVIDIA DRIVE PX2 作為人工智慧平台,不過目前對於賽事用的車輛仍所知甚少,而 Roborace 官方的 YouTube 公布一段影片,宣布 Roborace 人工智慧開發套件 DevBot 開始在英國知名的銀石賽道進行試車的短片。從影片與 Roborace 官方所提供的照片中可看到 DevBot 仍裝載在基於具備駕駛ˋ座的車輛上,如果從影片中是由人類駕駛後再由 DevBot 接手駕駛推測, DevBot 目前是透過人類駕駛後 Chevelle.fu 8 年前
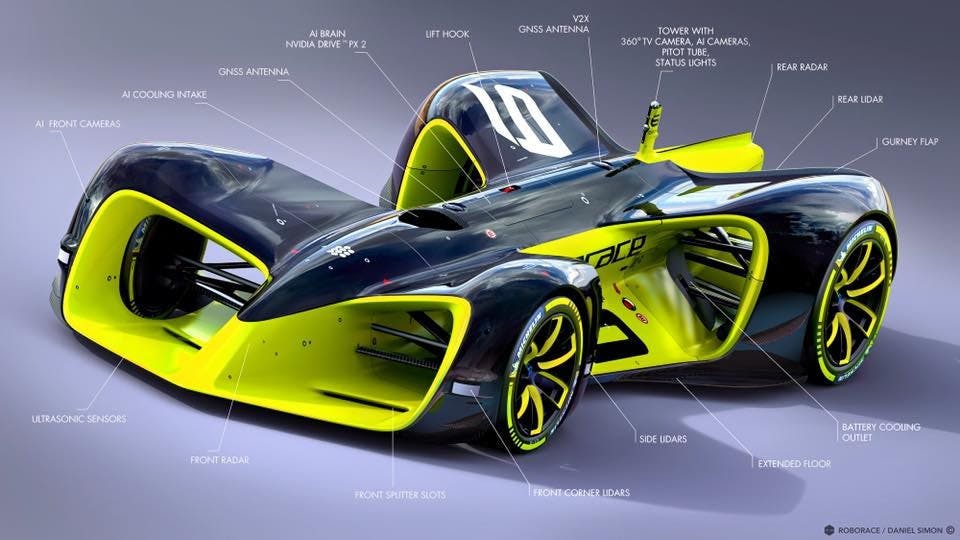
qualcomm nvidia TEGRA 科技生活 pascal drive px2 roborace 搭載人工智慧的 Roborace 賽車上面有那些高科技的裝置呢? 圖片來源: Roborace 粉絲團預計在明年以 Formula E 子賽事開始比賽的自動駕駛電動車賽事 Roborace 最近在粉絲團貼出一張圖片,簡單的介紹了這台高科技結晶的賽車上到底有甚麼重要的科技技術,以及主要元件所擺放的位置。可看到作為自動駕駛系統核心重點的 NVIDIA Drive PX2 模組的位置位於車輛的中央,模組的前後方則有用於定位的 GNSS 天線,另在前方天下下有著用於輔助 Drive PX2 散熱的進氣孔,偏向車尾的地方突出的那根東西內安裝了包括 360 度錄影機(供節目轉播使用)、攝影機,並兼具空速管以及狀態燈的功能,至於與鼻翼一體的前輪拱搭載了包括超音波感測器、前 Chevelle.fu 8 年前
Nvidia將以自動駕駛模組參與Roborace無人車賽事 此次GTC 2016主題演講尾聲中,Nvidia執行長黃仁勳宣布將以自動駕駛系統模組Drive PX 2投入預計在2016年至2017年間以全電力系統驅動的「Roborace」無人車賽事,藉此讓參與競賽的10家車廠能藉由Drive PX 2模組運算效能發揮更精準的高速自動駕駛表現,並且能透過賽事累積經驗讓自動駕駛車輛產品能以更快速度發展。 ▲Nvidia宣布以自動駕駛模組Drive PX 2參與Roborace無人車賽事 在日前Qualcomm宣布將以本身LTE數據通訊晶片,以及Qualcomm Halo無線充電技術參與預計2016年至2017年間以全電力系統驅動的「Roborace」無人車賽 Mash Yang 9 年前
產業消息 nvidia gpu nvidia tegra drive pascal drive px2 GTC 2016 : NVIDIA 宣布將 DRIVE PX2 車載自動駕駛學習平台投入 ROBORACE 無人駕駛賽事 還記得先前公布的 ROBORACE 賽事的大會賽車嗎? NVIDIA 在 GTC 宣布,這場標榜電動與人工智慧自動駕駛的賽事將採用於今年 CES 所發表的 NVIDIA DRIVE PX2 作為其人工智慧核心,未來參與賽事的車隊將展現各自對於自動駕駛邏輯撰寫的能耐在這場賽事中爭豔。DRVIE PX2 基於兩顆下一代 NVIDIA Tegra 應用處理器以及基於 Pascle 架構的雙 GPU (但與今日所亮相的 Tesla P100 將為不同核心),目前僅公布下一代 Tegra 採用雙核 Denver 核心搭配 4 核心 Cortex-A53 ,至於整體運算效能達到 8TFLOPS , DRI Chevelle.fu 9 年前