汽車未來 Waymo 自動駕駛技術 自動駕駛卡車 Uber Freight Driver as a Service 貨物快遞服務 司機即服務 Waymo 與 Uber 簽署長期合作 用自駕卡車貨運技術打造「司機即服務」運作模式 雙方合作第一階段將把搭載Waymo自動駕駛技術的Peterbilt卡車應用在Uber Freight貨物快遞服務,預計今年底內完成整合,藉此由Waymo擔任運營業者角色,提供「司機即服務」 (DaaS, Driver as a Service)的業務項目。 Waymo目前與Uber旗下貨運業務單位Uber Freight簽署長期戰略合作,雙方將投入推動自動駕駛卡車貨運技術發展。 在此合作下,未來Waymo服務將能運用Uber Freight貨物快遞服務相關技術,藉此將自動駕駛卡車應用在貨運車隊佈署需求。 而合作內容將分成兩階段發展,其中第一階段將把搭載Waymo自動駕駛技術的Peterbilt Mash Yang 2 年前
科技應用 自駕車 電子圍籬 舊金山警察局 隱私爭議 舊金山警局自駕車出勤中 引發沿途錄影隱私爭議 將自駕車應用在執勤過程,引發電子前線基金會 (EFF)等人抗議,認為美國警方已經可以合法取得車牌辨識紀錄、電子圍籬、智慧門鈴等紀錄資料,如今再加上可透過自駕車作為監視輔助工具,勢必將使警方有更大權力透過科技產品取得更多民眾隱私。 舊金山警察局目前已經開始將自駕車應用在巡邏等出勤業務,卻引發隱私爭議問題。 依照The Motherboard報導指稱,舊金山警察局開始將自駕車應用在出勤業務,同時也有參考文件說明警察人員在路上遇見「執勤」中的自駕車應該如何應對,以及如何取得自駕車在執勤過程透過攝影鏡頭錄製影像內容。 在報導內容中,更指出舊金山警察局已經將自駕車作為巡邏、案情調查輔助設備。不過,舊金山 Mash Yang 3 年前
科技應用 三星 UFS UFS 4.0 三星 UFS 4.0 儲存元件發表 存取效率更高、更省電、容量更大 將帶動手機、自駕車、虛擬視覺頭戴裝置等邊緣運算 在三星的UFS 4.0儲存元件設計中,採用旗下第7代V-NAND垂直記憶體,搭配專利設計的控制器,藉此對應每秒可達4200MB連續讀取速度表現,同時在連續寫入則可達每秒2800MB,相比UFS 3.1規格的使用功耗則會降低46%,意味將可讓智慧型手機待機時間大幅增加。 三星半導體 (Samsung Semiconductor)宣布推出旗下UFS 4.0儲存元件,標榜提供業界最高存取效能,在每組通道可達23.2 Gbps傳輸速度,將是目前主流規格UFS 3.1的2倍以上。 除了將近一步提升智慧型手機資料存取效率,並且增加終端裝置上的運算效能,三星更標榜能透過UFS 4.0儲存元件帶動自駕車、擴增 Mash Yang 3 年前
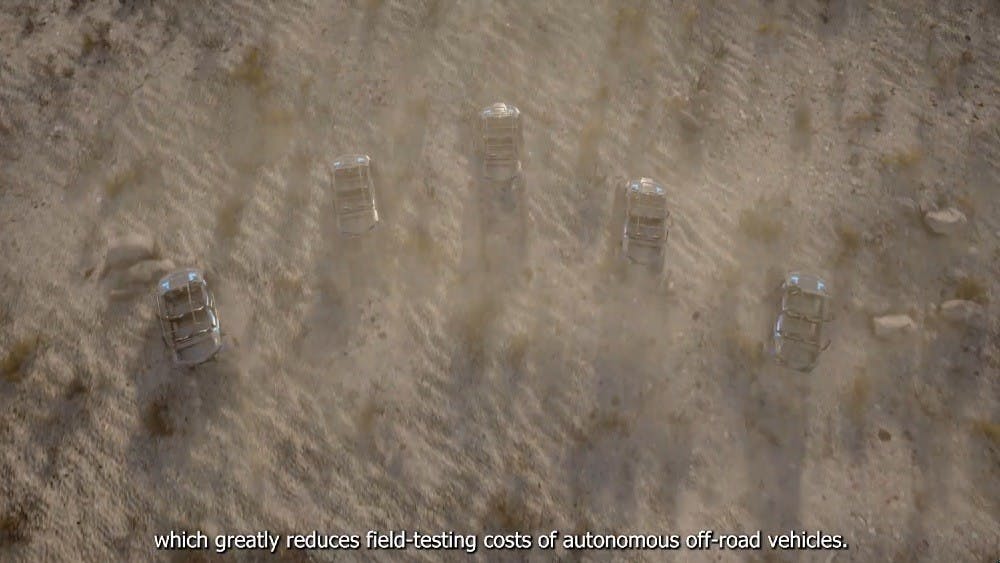
汽車未來 intel 自駕車 越野 RACER-Sim Intel 與美國國防部合作開發 越野環境用自駕車模擬設計方案 RACER-Sim 以模擬方式縮減開發對應使用自駕車所需時間 對應越野環境使用的自駕車,相較對應公路環境使用的自駕車會面臨更多挑戰,其中包含不像一般公路會有明顯道路邊界標記、道路指示等識別特性,同時路況也可能充滿泥土、塵埃,或是充滿碎石、植被,甚至必須行經有明顯高低落差等不完整路況,因此也讓RACER-Sim開發模擬設計方案必須考慮更多因素。 Intel與美國國防高等研究計畫署 (DARPA)合作,將透過Intel實驗室與西班牙巴塞隆納電腦視覺中心、美國德州大學奧斯汀分校等技術資源支撐下,將投入開發越野環境使用的自駕車模擬設計方案RACER-Sim。 由於目前自動駕駛技術多半是針對公路使用環境設計,RACER-Sim主要希望對應越野環境使用的自駕車模擬設 Mash Yang 3 年前
科技應用 intel DARPA 自動駕駛 元宇宙 數位孿生 Intel 助美國 DARPA 進行越野自駕車自模擬到現實的轉移學習,透過 RACER-Sim 降低開發成本並消弭虛擬至真實環境的差距 Intel 實驗室公布與美國國防高等研究計畫署 DARPA 、西班牙巴塞隆納電腦視覺中心、美國德州大學奧斯汀分校的合作成果,借助稱為 RACER-Sim 的計畫,使 DARPA 可在虛擬環境中進行越野自駕車的開發並進行到現實的轉移學習,同時透過越野模擬平台降低開發成本。 ▲越野環境與一般自駕車行駛的公路條件大為不同,充滿更多變數以及與物理之間的互動 雖然在虛擬環境中進行自動駕駛技術的模擬與訓練已是目前火熱的元宇宙( Metaverse )應用,不過此次 DARPA 所開發的技術並非行走於一般道路,而是未有路網、且路面由於各種岩石、坑洞等變數更高的越野環境,當前也幾乎沒有為越野自動駕駛所開發的虛 Chevelle.fu 3 年前
汽車未來 電動車 Elon Musk 自駕車 Tesla Tesla 第一季財報營收達 188 億美元 2024 年開始量產沒方向盤的自駕計程車 Elon Musk也透露預計在2024年開始量產不具備方向盤與煞車踏板的自駕計程車,而目前也已經開始向車主開放測試Beta版本的FSD全自駕功能,希望能進一步實現更完整的自動駕駛應用發展。 Tesla稍早公布2022財年第一季財報結果,其中營收達187億5600萬美元,相比去年同期增加81%,淨利則達3億3200萬美元,成長幅度高達6.6倍,而Elon Musk更在財報會議上表示今年交車比例有機會增加至60%,同時未來幾年也可能維持在平均50%比例。 至於營收成長原因,除了與目前傳統車廠陷入全球供應鏈供應不足問題,甚至面臨停止部分產線營運,使得部分購車需求轉向Tesla,加上全系列車款售價均作 Mash Yang 3 年前
汽車未來 英國 電動車 自動駕駛 自駕車 英國將允許自駕車在自動駕駛時 駕駛人可觀看電影或電視 藉此要求車輛製造商、自駕技術業者提供更安全設計 在稍早由英國交通部提出修改方案,顯然將放寬駕駛人必須隨時緊盯前方路況的規定,意味將進一步要求製造自駕車,或是提供自駕技術的業者,必須提供不會發生事故的自駕車輛使用體驗。 在由英國交通部所提出交通法規修改方案中,將允許英國駕駛人可在車輛處於自動駕駛過程時,透過車載螢幕關看電視或電影內容,但依然不允許使用手機。 在先前提議中,英國法律監管機構認為一旦自動駕駛車輛發生事故時,不應由車內駕駛承擔責任,而是由打造自動駕駛技術的企業,或是製作自動駕駛車輛的業者負責,希望藉此推動自駕車使用時的安全技術發展。 雖然無須承擔相關責任,但車內駕駛依然需要維持隨時留意前方路況、不做任何影響自動駕駛行為,同時也需要針 Mash Yang 3 年前
科技應用 自駕車 Qualcomm Technologies Snapdragon Ride Veoneer Arriver 高通正式取得 Veoneer 旗下 Arriver 自駕車相關資產 強化提供先進駕駛輔助系統能力 推動 Snapdragon Ride 平台產品組合 收購完成後,Qualcomm Technologies將基於先前與Arriver合作的基礎,預計將電腦視覺、駕駛策略和駕駛輔助資產整合進其領先的Snapdragon Ride平台產品組合。除了具備擴展能力支持廣泛汽車類型外,Snapdragon Ride平台的模組化特性亦可為汽車製造商提供極大靈活性以充分發揮其開發的軟體功能。 先前與投資集團SSW Partners共同以每股37美元價格收購Veoneer之後,Qualcomm稍早宣布從SSW Partners取得Veoneer旗下Arriver相關資產。 而取得Arriver,將進一步強化Qualcomm以規模化方式向汽車製造商、第一階零組件 Mash Yang 3 年前
科技應用 nvidia AI Instant NeRF NVIDIA 改進 Instant NeRF 模型 2D 平面照片幾秒內合成 3D 場景 可應用在遊戲、動畫等產業 並加快自駕車、機器人模擬訓練效率 透過NVIDIA提高Instant NeRF模型運算效率,標榜能像75年前拍立得在幾分鐘內即可在照片上留下影像,僅需幾秒時間就能將大量2D平面照片轉換成擬真3D場景。同時,在NVIDIA改進的Instant NeRF模型應用表現,更能詮釋擬真光線與景深表現,讓3D場景整體視覺表現不會顯得突兀。 NVIDIA近期改進過去由加州大學柏克萊分校、Google研究院與加州大學聖地牙哥分校研究人員在2020年提出的Instant NeRF運算模式,讓大量2D平面照片可以在短短幾秒內合成自然的3D場景。 雖然過去已經有不少技術能將2D平面照片合成3D場景,但通常需要透過龐大運算效能與大量渲染時間完成,而在 Mash Yang 3 年前
汽車未來 俥科技 NVIDIA GTC nvidia 自動駕駛 Omniverse 數位孿生 GTC 2022 : NVIDIA 將在數位孿生環境建構北美、西歐與亞洲長達 50 萬公里環境,做為自駕車 AI 虛擬訓練環境 NVIDIA 自發表 Omniverse 平台技術後,迅速將這項技術拓展到各式領域,其中一項就是借助 Omniverse 打造數位孿生環境,提供自駕車技術進行 AI 模型訓練的安全環境;在今年 GTC 大會, NVIDIA 執行長黃仁勳宣布將以北美、西歐與亞洲的主要道路,在數位孿生環境建構長達 50 萬公里的公路,並透過數百萬輛客車擴充與更新模擬,作為自駕車技術的虛擬訓練環境,旨在為自駕車車隊打造距地球規模的數位孿生並探索新演算法與設計,並作為導入實際道路測試前的把關驗證。 NVIDIA 將借助兩種情境模擬方式建構不同的數位孿生環境,包括以 NVIDIA DRIVE Map 高解析 3D 圖資 Chevelle.fu 3 年前