Intel 助美國 DARPA 進行越野自駕車自模擬到現實的轉移學習,透過 RACER-Sim 降低開發成本並消弭虛擬至真實環境的差距
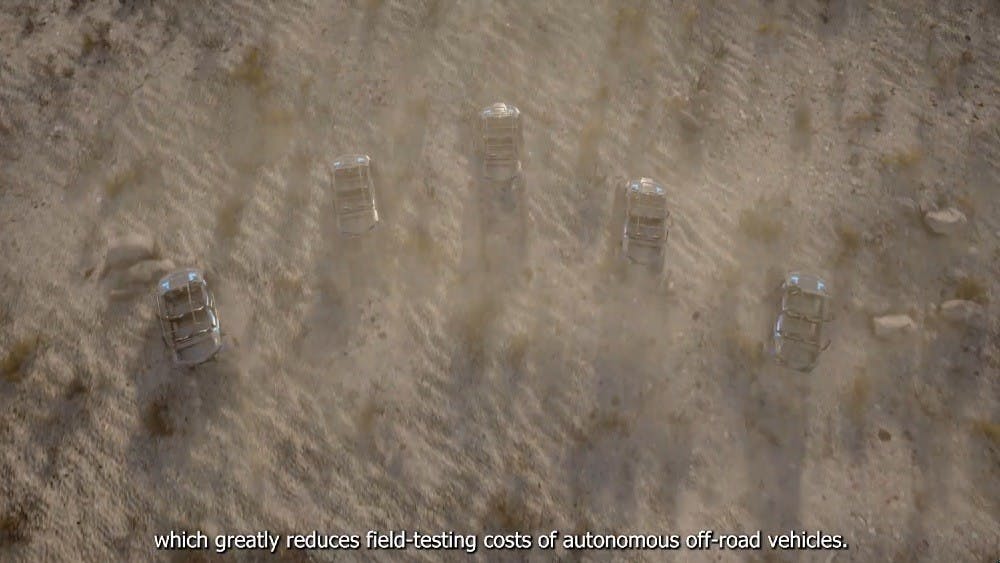
Intel 實驗室公布與美國國防高等研究計畫署 DARPA 、西班牙巴塞隆納電腦視覺中心、美國德州大學奧斯汀分校的合作成果,借助稱為 RACER-Sim 的計畫,使 DARPA 可在虛擬環境中進行越野自駕車的開發並進行到現實的轉移學習,同時透過越野模擬平台降低開發成本。 ▲越野環境與一般自駕車行駛的公路條件大為不同,充滿更多變數以及與物理之間的互動 雖然在虛擬環境中進行自動駕駛技術的模擬與訓練已是目前火熱的元宇宙( Metaverse )應用,不過此次 DARPA 所開發的技術並非行走於一般道路,而是未有路網、且路面由於各種岩石、坑洞等變數更高的越野環境,當前也幾乎沒有為越野自動駕駛所開發的虛
3 年前